近日,第29届IEEE机电一体化与机器视觉应用国际学术会议(The 29th International Conference on Mechatronics and Machine Vision in Practice, M2VIP 2023)于新西兰皇后镇召开。
本届会议设立最佳会议论文奖(Best Conference Paper Award),会议组委会根据文章水平和会议报告质量评选最佳会议论文并授予证书。韩建达教授课题组的论文“Control-oriented Modeling of a Soft Manipulator Using the Learning-based Koopman Operator”荣获最佳会议论文奖(Best conference paper award),该论文第一作者为博士生陈杰,指导教师为韩建达教授和党宇老师。
论文获奖证书
论文简介
软体机械臂凭借其独特的灵活性和安全性优势,已逐渐成为机器人领域的重要发展方向。这类机械臂能够通过自身的形变适应复杂的外部环境,实现在狭小空间内的安全操作,在医疗手术辅助领域展现出广阔的应用潜力。
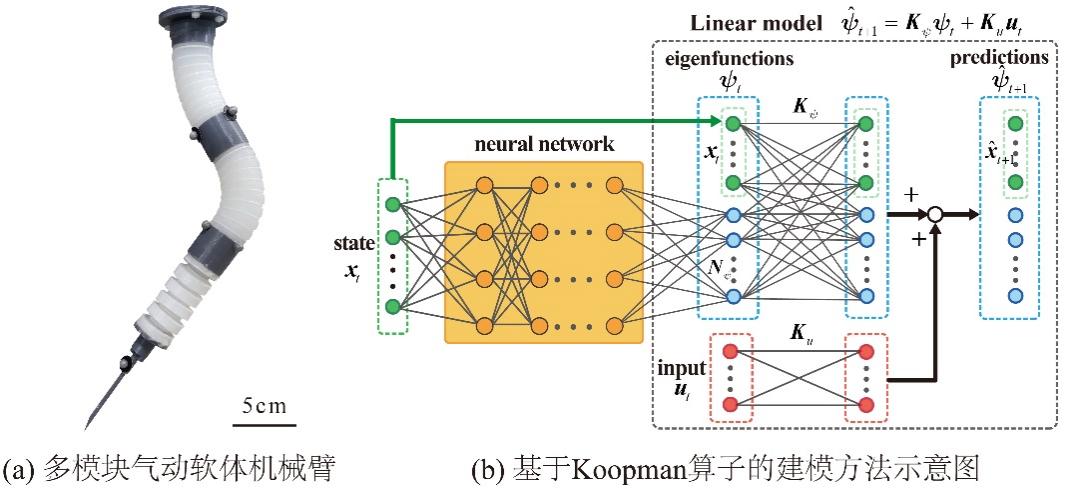
多模块气动软体机械臂及建模框架示意图
软体机械臂的建模一直是软体机器人领域研究的重点,对实现这类机器人的实际应用至关重要。此次获奖论文提出了一种基于学习的Koopman算子进行数据驱动建模的方法。该建模方法利用神经网络技术和Koopman算子理论,成功构建了软体机械臂简洁且高效的线性模型,显著提升了传统数据驱动模型的准确性。这一新模型在团队自主开发的软体机械臂平台上得到了实际验证,为软体机器人的实时控制和实际应用奠定了坚实的基础。目前,韩建达教授团队正在基于此建模方法进一步设计先进的控制策略,以推进软体机械臂在医疗手术辅助等关键领域的应用。
据悉,此次国际学术会议由新西兰奥克兰大学、英国利兹大学和新西兰梅西大学联合主办,旨在为机电一体化和机器视觉提供一个跨学科的国际论坛。会议主题涵盖了软体机器人、智能传感器、人工智能、机器视觉和医疗康复机电系统等科技前沿领域,吸引了来自全球的高校学者和研究者。
