导语
近期,研究院科研团队研究开发了导航-操作双臂协同骨科手术机器人系统,并评估了该系统的手术效果,为该类系统的临床价值提供了数据支撑与技术参考,有助于促进脊柱手术的智能化、精准化、高效化发展,推动国产高端医疗装备发展。相关研究成果在IEEE Transactions on Medical Robotics and Bionics上发表。
研究背景
骨科手术对操作精度与稳定性的要求极高,尤其在脊柱等关键区域,任何微小误差都可能对患者预后产生重大影响。传统手工手术不仅依赖经验丰富的外科医生,同时仍存在操作稳定性差、个体差异大等问题。近年来,机器人技术发展迅速,并已广泛应用于医疗领域。针对日益增长的医疗需求,结合机器人控制、医学影像和计算机图像处理等关键技术,骨科手术机器人系统也得到了快速发展。在常规的骨科手术机器人系统中,光学导航装置通常固定在一个被动调节支架上,术中由医生手动调整观测视角。然而,手术室环境复杂,固定导航在临床应用中存在测量空间受限、视线遮挡、光学导航与手术机器人缺乏协同配合等问题。为此,本研究基于主动导航技术,开发了导航-操作双臂协同骨科手术机器人系统,旨在提高手术导航的稳定性和手术操作的准确度。
研究概述
针对光学导航面临的靶标易超出观测范围、视线遮挡等问题,本研究提出了一种导航-操作双臂协同骨科手术机器人系统,能够实现术前规划、术中主动导航和精准手术操作等功能。为了验证该系统的临床适用性,本研究在椎弓根螺钉置入手术场景下开展实验研究。科研团队首先在人体脊柱模型上进行了完整的手术流程验证,包括椎弓根螺钉置入术前规划、术中导航、精准操作及手术效果评估。为进一步评估双臂协同系统的精度与可靠性,分别以离体猪脊骨和活体猪作为实验对象进行椎弓根螺钉置入手术。
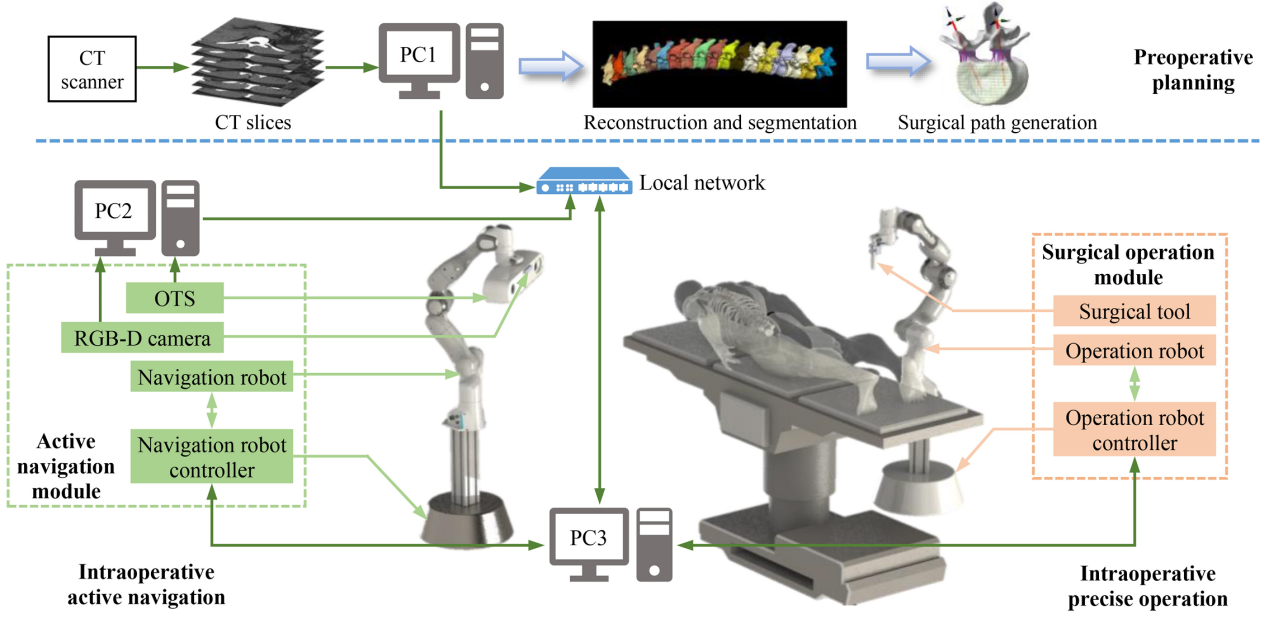
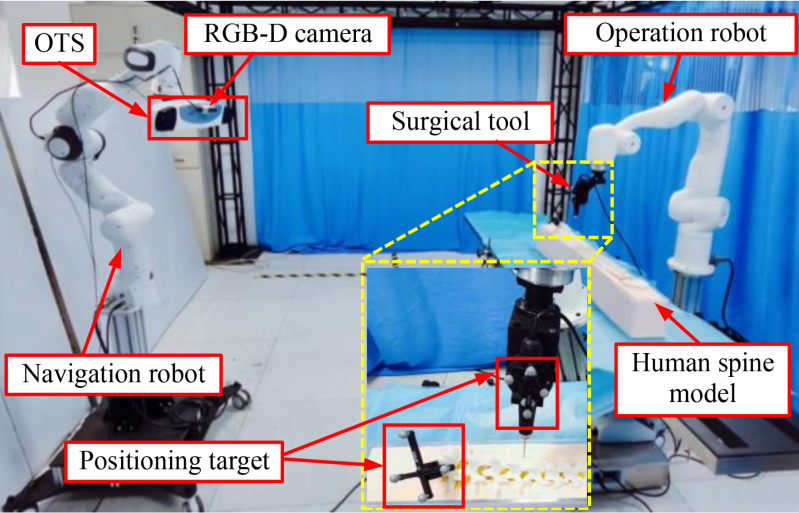
所提“导航-操作双臂协同骨科手术机器人系统”的硬件组成

所提“导航-操作双臂协同骨科手术机器人系统”的软件架构
实验范式和方法
将导航-操作双臂协同骨科手术机器人系统应用于椎弓根螺钉置入手术中,以人体脊柱模型为实验对象,进行了术前规划、术中精准操作和术中主动导航。为了评估系统的手术效果,分别以人体脊柱模型、离体猪脊骨和活体猪为实验对象进行椎弓根螺钉置入手术,验证系统的精准度和安全性。
研究实验范式
评估指标
椎弓根螺钉置入的好坏程度通常依据Gertzbein-Robbins分级标准来评估。根据椎弓根螺钉穿透椎弓根的程度,该分级标准分为五个等级:
A:完全处于椎弓根内,未穿透椎弓根皮质;
B:超出椎弓根<2mm;
C:超出椎弓根2-4mm;
D:超出椎弓根4-6mm;
E:超出椎弓根>6mm或处于椎弓根外。
临床上通常将A级和B级视为令人满意的手术效果,C至E级可能会出现神经系统症状,被视为手术效果不满意。为了更好地量化术前规划路径与实际手术路径的位置关系,本研究将A级细分为3个等级:
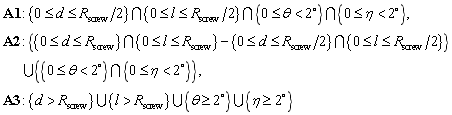
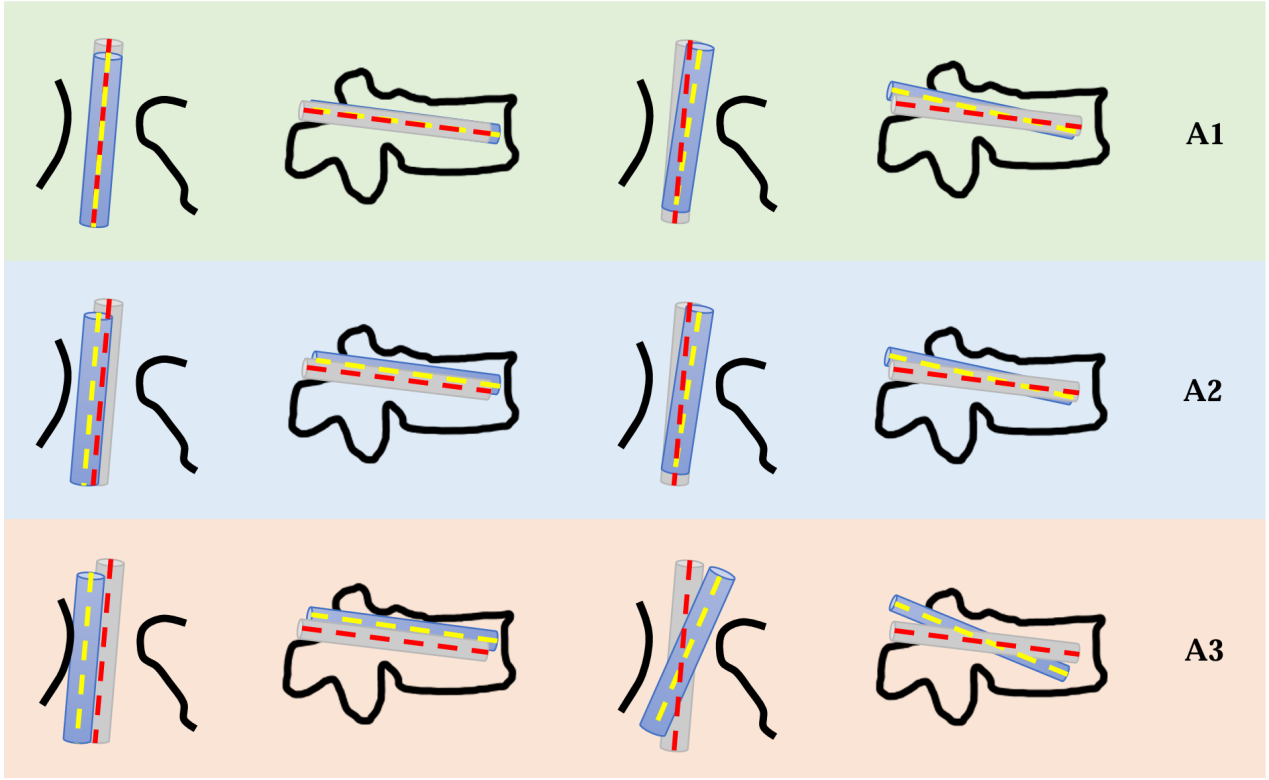
研究评估标准
研究结果
在人体脊柱模型中,共在7个胸椎和5个腰椎上置入了24枚椎弓根螺钉,其中腰椎第四节(L4)和腰椎第五节(L5)的椎弓根螺钉直径为4mm,其他椎节的螺钉直径为3mm。实验的24枚椎弓根螺钉,其中A1级占21%,A2级占46%,A3级占29%,B级占4%,规划路径与实际路径在横断面和矢状面的位置误差分别为0.53±0.35mm和1.08±0.76mm。横断面和矢状面的规划路径与实际路径之间的角度误差分别为0.35±0.34°和0.45±0.39°。在离体猪脊骨实验中,对5个椎节(10个椎弓根)进行了椎弓根置入手术。10枚螺钉均可被评为A级,其中3枚为A1级,5枚为A2级,2枚为A3级。在活体猪实验中,对2个椎节(4个椎弓根)进行了椎弓根螺钉置入手术,其中3枚螺钉被评为A级,1枚被评为B级。该实验结果在临床上是可以接受的。
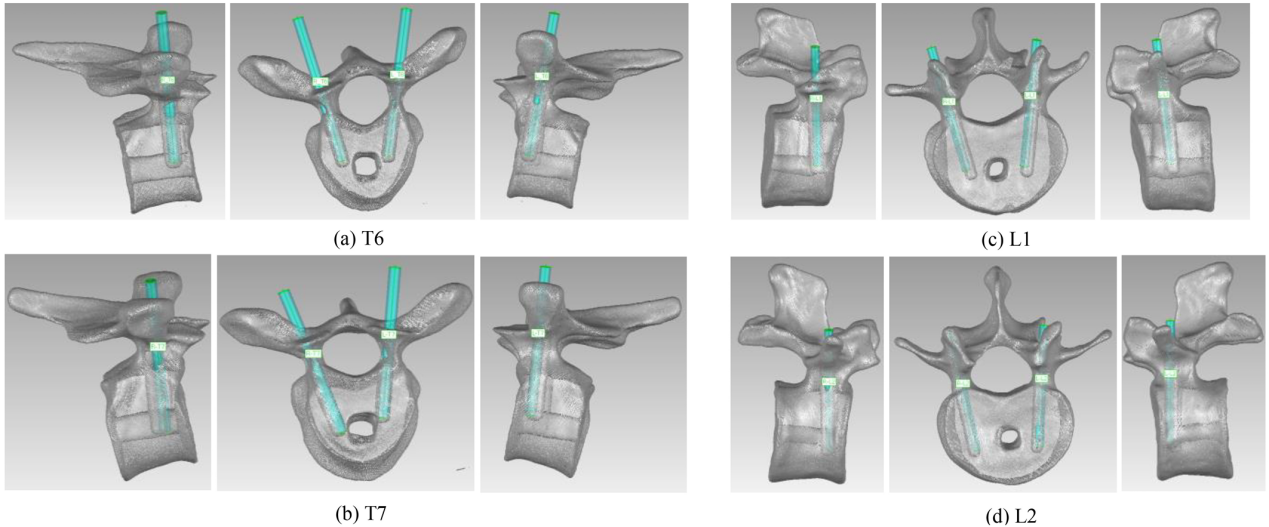
所提系统在人体脊柱模型上进行手术的实验结果
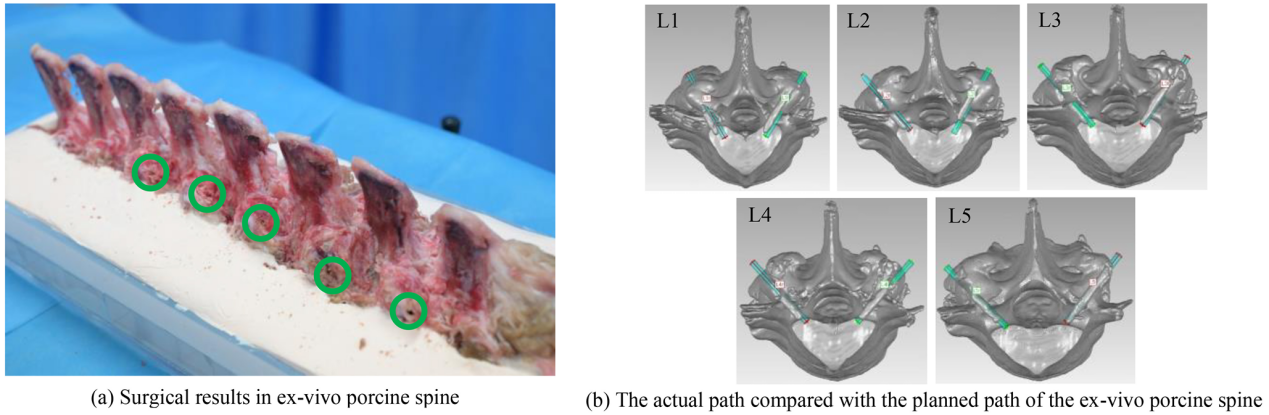
所提系统在离体猪脊骨上进行手术的实验结果
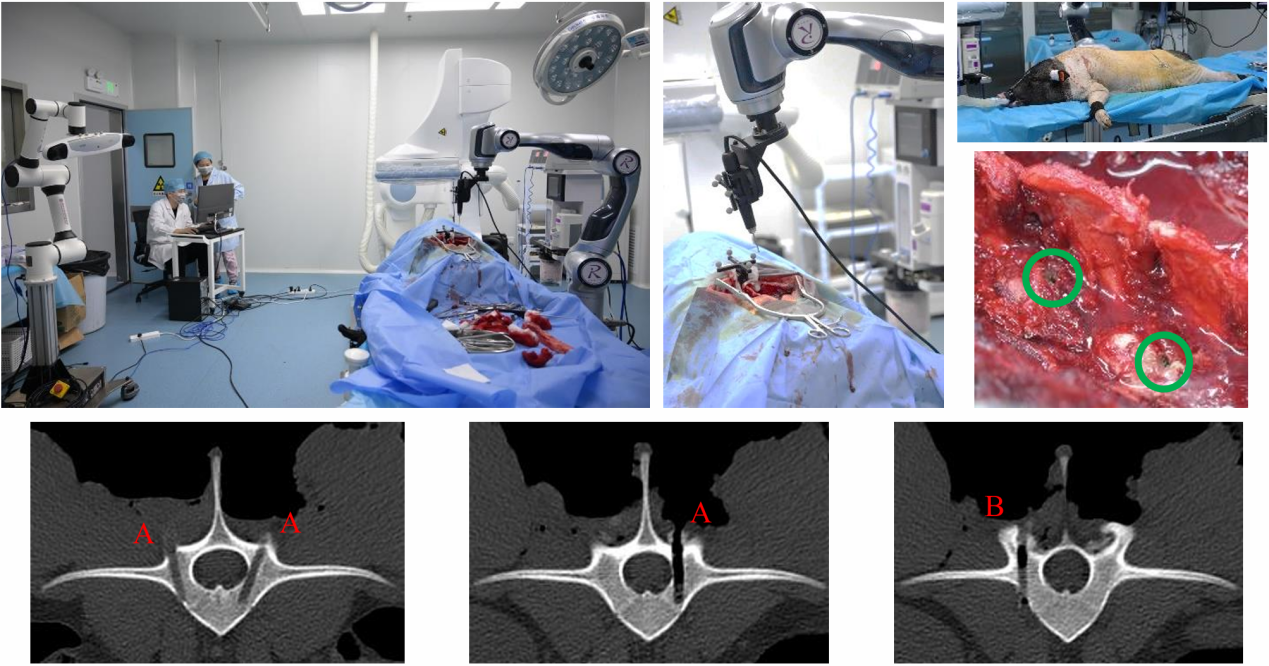
所提系统对活体猪进行手术的实验结果
研究意义
本研究结合主动导航系统,提出了导航-操作双臂协同骨科手术机器人系统。导航臂与操作臂协同配合,使光学导航装置能够在整个手术过程中灵活适应手术场景,实现对多个靶标的连续观测。本研究通过引入双臂,推动骨科手术机器人系统从单臂操作向多臂协同手术的发展,拓展其在复杂骨科手术中的应用;有效提高手术精准度,降低医生负担,提高手术效率,为脊柱手术的智能化、精准化、高效化发展提供技术支撑,推动国产高端医疗装备发展。
成果来源
论文第一作者为研究院博士研究生耿鹏秀,通讯作者为秦岩丁教授,该研究工作得到了深圳市高层次人才团队项目、广东省自然科学基金面上项目、深圳市可持续发展科技专项、深圳市盐田区科技创新局南开大学深圳研究院建设发展扶持资金的资助。
P. Geng, M. Luo, Y. Qin, et al. Design and accuracy assessment of NOR²CORS: navigation-operation dual-robot collaborative robotic system for orthopedic surgery. IEEE Transactions on Medical Robotics and Bionics, 2025, 7(2): 502-513.
*以上图片均来自论文。
(论文链接:https://ieeexplore.ieee.org/document/10924211)
