近日,第12届IEEE电气工程、控制和机器人技术国际学术会议(The 12th International Conference on Electrical Engineering, Control and Robotics, EECR 2026)于中国苏州召开,研究院韩建达、于宁波教授课题组的论文 “Safety-Critical and Task-Consistent Control for Proprioceptive Training of a Rehabilitation Robot Using High-Order Time-Varying CBFs” 荣获会议最佳学生论文奖(Best Student Paper Award),论文第一作者为博士研究生郝李子翼。

论文简介
近年来,随着脑卒中、脊髓损伤及人口老龄化等因素影响的加剧,本体感觉与平衡功能障碍人群不断增加,面向运动功能障碍人群的下肢康复训练需求日益增长。如何构建安全、有效且能够激发患者主动参与的康复训练范式,已成为神经康复与康复机器人领域的重要研究方向。本体感觉缺陷会削弱机体对关节位置、运动状态及外界扰动的感知能力,进而影响姿势调节、步态稳定以及复杂环境下的运动适应能力。针对上述问题,研究团队在系统设计、人机交互控制、多场景扰动训练及安全保障方面开展了系统性研究。
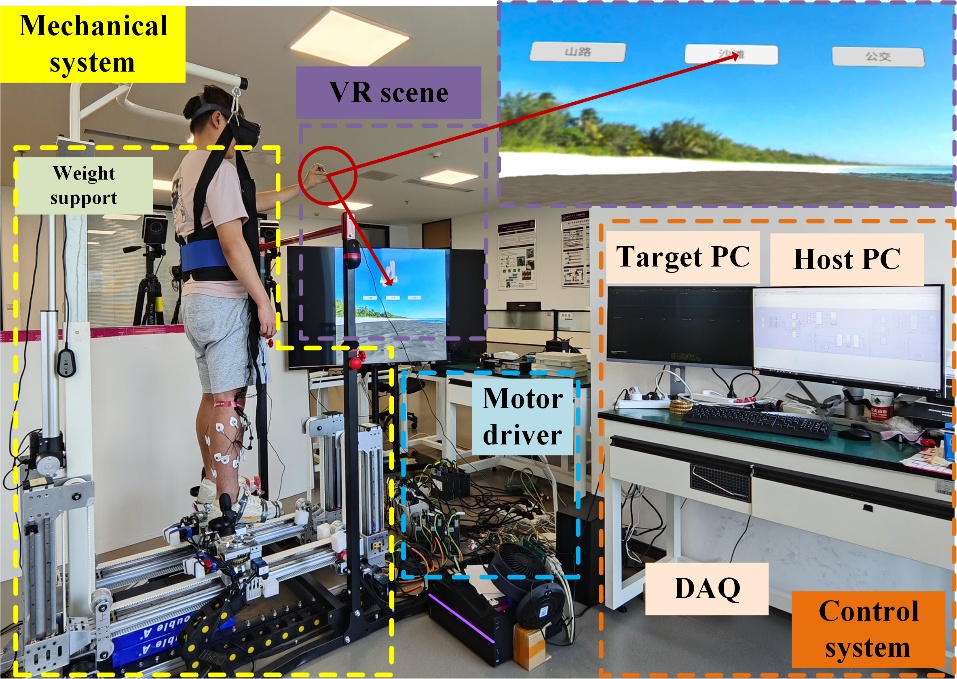
(a)本体感觉训练机器人系统
(b)安全控制框架
针对下肢康复训练中任务连续性与安全性难以兼顾、动态稳定性难以实时评估的问题,团队提出了基于高阶时变控制障碍函数的安全控制方法,并构建了面向多地形训练的视觉辅助步态稳定性评估方案。采用高阶时变控制障碍函数对踝关节角度边界进行显式约束,将安全约束、任务一致性约束及执行器限制统一纳入控制框架,并结合相位自适应参考规划机制,在保证训练连续性的同时抑制关节过限运动。面向多地形扰动训练过程中的稳定性量化需求,针对传统运动捕捉系统部署复杂及临床适应性不足的问题,构建了基于单目视觉的稳定裕度在线评估方案,实现了步态稳定性的实时量化,为训练参数调整与训练效果分析提供依据。该研究从安全控制与辅助评估两个层面提升了系统在复杂训练场景下的可行性与临床应用潜力。
团队情况
韩建达、于宁波教授团队在盐田区支持下建立医疗康复机器人实验室,研发出面向本体感觉训练的下肢康复机器人、面向手功能康复的刚柔耦合外骨骼机器人、面向生物组织分布监测的电阻抗成像系统、面向神经康复的脑-肌-肢功能量化分析系统等智能化装备和软件系统,并与医院合作开展应用研究。
会议情况
据悉,此次国际学术会议由IEEE国际机器人与自动化协会与西交利物浦大学联合主办,吸引了来自高校、科研机构及产业界的专家学者参会,围绕电气工程、控制科学与机器人技术等前沿领域展开深入交流,议题涵盖智能机器人运动控制、自主系统、系统辨识与状态估计、新能源电力电子控制,以及无人系统结构设计与路径优化等方向。
