近日,南开大学深圳研究院秦岩丁教授团队在IEEE Sensors Journal发表题为“In Situ Temperature-Compensated Puncture Force Sensing for Brain Stereotactic Puncture Needle Using Fiber Bragg Grating”的论文,并从当期189篇论文中被选为特色论文(Featured Article)。论文的第一作者为秦岩丁教授,通讯作者为方格副教授和王鸿鹏教授。
在韩建达教授的带领下,南开大学深圳研究院组建了智能医疗机器人研究团队。团队面向世界科技前沿、面向人民生命健康,秉持人工智能算法与机器人系统“软硬结合”、科技创新与转化应用“两翼齐飞”的理念,建立了“术像一体手术机器人”和“脑肢融合康复机器人”特色研究方向。

1、IEEE Sensors Journal介绍
IEEE Sensors Journal于2001创刊,是传感器工程和技术领域的权威期刊,征稿涉及信号处理与分析、通信、网络与广播技术、元件、电路、器件与系统以及机器人与控制系统等和传感器技术密切相关的主题。IEEE Sensors Journal的2025年影响因子为4.5,JCR分区Q1。自2020年以来,IEEE Sensors Journal每期会选出一篇特色论文(Featured Article),以此来推广热点话题和优秀论文,被选出的论文将在6个月内免费开放(Open Access)。
2、研究背景
在脑立体定向手术中,实时、精准感知穿刺针与脑组织之间的相互作用力,对于提升手术精度、保障手术安全至关重要。光纤布拉格光栅(FBG)传感器凭借其测量精度高、生物相容性好、抗干扰能力强等优势,在该领域极具应用潜力。传统的双光栅补偿技术因光栅存在空间分离问题,易产生温度梯度,进而引发明显的测量误差,无法满足手术安全稳定的要求。该研究提出一种基于共面集成参考光栅的原位温度补偿方法,并分别设计了三维与一维力传感器,通过将多组光栅集成在相同的横截面,消除了穿刺过程空间温度梯度所带来的瞬时测量误差,这极大程度提升了手术的安全性。
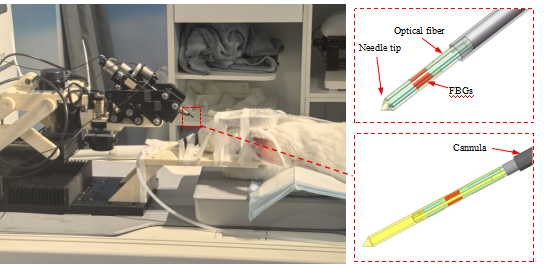
图1:脑立体定向手术场景
3、研究概要
穿刺针设计
该研究通过在穿刺针集成多根光纤来监测穿刺过程中针尖与脑组织间的穿刺力。穿刺是脑立体定向手术的基本操作。本研究研制的穿刺针包括可分离的套管和内针,穿刺完成后可拔出内针,为其他手术工具提供通道。穿刺针的结构设计如图 2 所示:套管为镍钛合金,外径 2.0 毫米,内径 1.6 毫米,内针的直径小于 1.6 毫米。针尖包含三个均匀分布的光纤粘合槽,每根光纤上刻蚀了两个 FBG 光栅,通过轴向力灵敏度的差异来计算轴向力的同时实现了温度补偿。
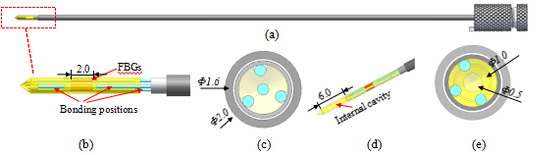
图2:穿刺针结构设计
穿刺针性能
传感器标定装置如图 3 (a) 所示,电子天平显示作用在针尖上的垂直向上的力,通过两个旋转滑台可改变力的方向,FBG 解调仪连接计算机并发送光纤上的波长数据,通过团队开发的相应软件实时显示并存储三维力。图 3 (b) 显示了所制备的三维力传感器Fx、Fy 和Fz 和一维力传感器Fz的标定结果和误差。三维力传感器X、Y、Z轴的均方根误差分别为21.09,25.07,15.21 mN。传感器分辨率分别为2.72,3.57,1.89 mN。一维力传感器Z轴均方根误差为69.10 mN,传感器分辨率为2.37 mN。
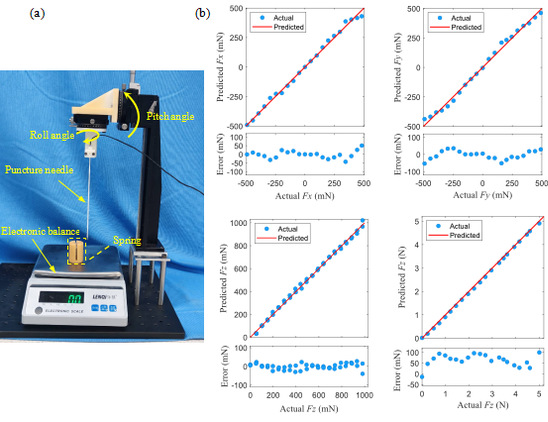
图 3 :传感器性能指标测试
琼脂穿刺实验
使用如图4 (a) 所示的浓度为0.6%的琼脂糖溶液制备了脑组织仿生体模。采用带有异位和原位温度补偿方法的同款穿刺针,对琼脂糖体模进行穿刺。在穿刺过程中,力传感器会同时受到温度和力的影响。与实际穿刺手术相似,穿刺针从低温环境进入高温环境。对于采用异位温度补偿的穿刺针,一旦针尖接触体模,穿刺力便开始增加。然而,穿刺力随后突然下降,并降至其负向最小值−180 mN。当针完全刺入体模后,测得的穿刺力逐渐恢复并稳定在350 mN左右。这种虚假的力测量结果在临床上是不可接受的。而对于采用原位温度补偿的穿刺针,它能够准确捕捉到350 mN的峰值穿刺力,以及随后下降并稳定在70 mN的过程,该力测量结果与实际穿刺过程一致。通过对比这些实验结果,可以证明原位温度补偿方法的有效性。
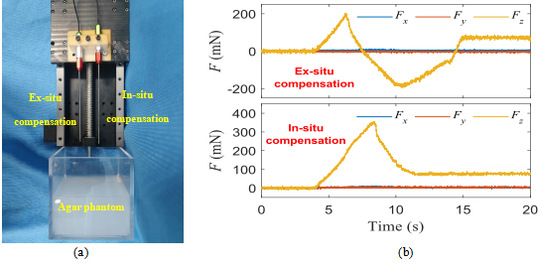
图4:琼脂穿刺实验
活体动物穿刺实验
在实时MR图像的引导下,穿刺机器人精确调整穿刺针的位置和姿态。一旦对准目标,穿刺针便以恒定速度缓慢进针。图5(b)展示了测得的穿刺力变化情况。穿刺针接触软脑膜后,穿刺力迅速增加。在此阶段,针尖受到软脑膜变形引起的反作用力。随着穿刺针的刺入,最大穿刺力达到约265 mN。当针尖完全刺穿软脑膜并完全进入脑组织后,穿刺力逐渐下降,并维持在约175 mN的恒定值。初始的线性增加代表了软脑膜的弹性变形。265 mN的峰值标志着刺穿该膜所需的临界破裂力。随后的“力降”代表了从表面穿透到实质刺入的转变。175 mN的稳态力主要包括针尖的切割阻力和针杆与脑组织之间的摩擦力。这与穿刺力的预期变化规律一致,证明了所设计的传感器能够准确感知穿刺过程中的力变化。
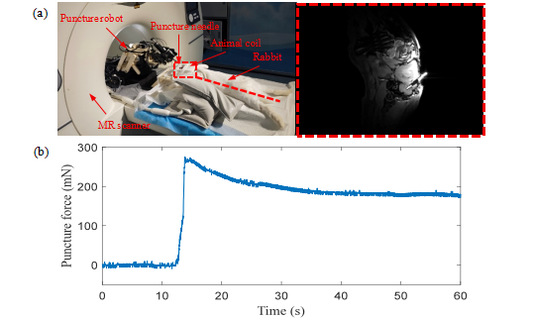
图 5 : 活体动物穿刺实验
4、作者介绍

秦岩丁,南开大学深圳研究院教授、博导、南开“百青”,主要研究方向为医疗机器人与微纳操作机器人,相关研究成果入选第27届中国国际高新技术成果交易会优秀科研成果创新奖、“科创中国”创新创业投资大会全国百强。共主持国家重点研发计划课题2项、国家自然科学基金项目3项、京津冀基础研究合作专项项目1项,以第一或通讯作者发表期刊论文60余篇,授权国内发明专利14项、授权美国专利1项、完成PCT国际申请7项。

方格,南开大学深圳研究院副教授、南开“百青”,主要研究方向为医疗机器人、软体机器人以及智能传感与控制。主持天津市自然科学基金项目,在Science Robotics、T-RO、RA-L等期刊发表论文。

王鸿鹏,南开大学深圳研究院教授、博导,智能系统与机器人技术研究院副院长,计算机与控制工程国家级虚拟仿真实验教学中心主任,中国新一代人工智能发展战略研究院研究员。从事人工智能与机器人、智能医疗与自主手术、虚拟现实与智能仿真研究。主持国家重点研发计划项目课题、国家自然科学基金项目、天津重点研发计划重点支撑项目、深圳科技重大专项。在T-RO、TIP、TIE、T-ASE、KBS、PR等期刊及ICRA、IROS、CASE等会议发表论文。
本文的作者还包括南开大学深圳研究院的韩建达教授、陆军军医大学的易良教授、上海联影医疗的黄彦琦博士,以及课题组的郭鸿哲、王龙昕、文子康同学。
